ربات ناهموار نورد
2020-05-23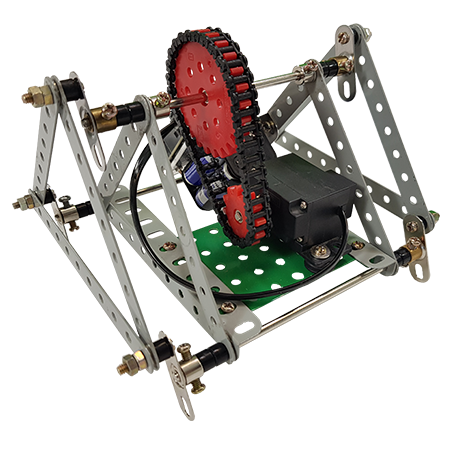
ربات مثلثی نسخه ۱
2020-07-11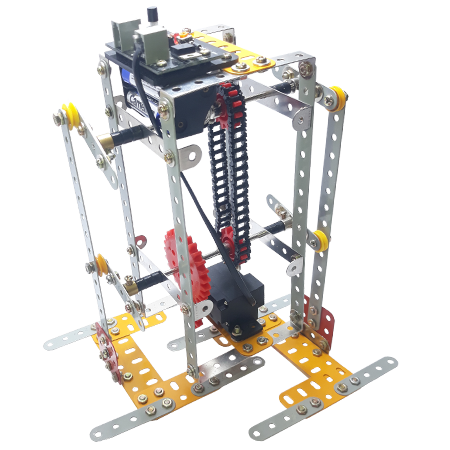
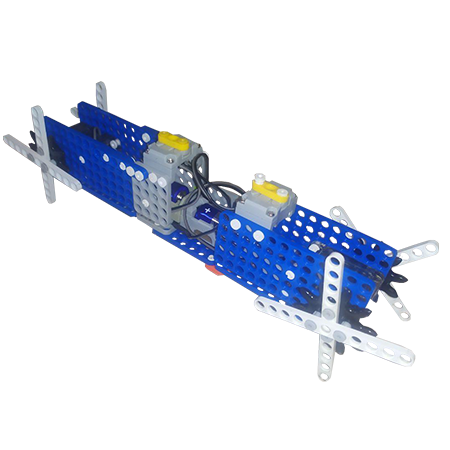
BIPED DROID
دروید دوپا
سطح علمی
ترم ۲ و ۳ کای ربات
ارسال توسط
پیشروبات
نوع سازه
غیر هوشمند
پیش از این در صفحه ربات انساننما، مراحل ساخت انسان نمایی که بر روی چرخ حرکت میکند را برایتان ارائه دادهایم. اما در این صفحه میخواهیم ربات دوپایی بسازیم که مانند انسان بتواند توسط قدم برداشتن به جلو یا عقب حرکت کند.
اما ساخت رباتی که ضمن حفظ تعادل خود بر روی دوپا، قدم نیز بردارد به سادگی آنچه که در ابتدا تصور میشود نیست. بلکه نیاز به رعایت چند نکته فنی مهم دارد که در ادامه مطالب به آنها اشاره خواهیم کرد.
نکات فنی:
مساحت کفپای ربات
هر چقدر ربات ما بلند قامتتر باشد و مرکز ثقل آن از زمین فاصله بیشتری داشته باشد، کف پای او نیز باید پهنتر باشد تا در هنگامی که یک پای خود را از زمین بلند کرده است بتواند تعادل خود را بر روی پای دیگر حفظ نماید.
مرکز ثقل
مرکز ثقل به نقطه ای از جسم میگویند که اگر در زیر آن تکیه گاهی قرار دهیم تعادل جسم روی آن حفظ میشود. هر جسمی که مرکز ثقل آن به مرکزش و در ارتفاع پایینتری قرار داشته باشد تعادل پایدارتری خواهد داشت. بنابراین توصیه میشود تا قطعات سنگینتر مانند موتور و جا باتری در قسمتهای پایینتر ربات و در مرکز بدن آن نصب شوند.
مکانیزم لنگ - Crank Mechanism
در بسیاری از رباتها و دستگاها، مانند پاهای یک ربات انساننما یا بعضی رباتهای حیواننما نیاز به حرکت خطی (رفت و برگشتی) داریم. این در حالی است که خروجی DC موتورهای مورد استفاده ما یک محور چرخان میباشد. به منظور تبدیل حرکت چرخشی به حرکت خطی یا بالعکس از مکانیزمهای مکانیکی مختلفی میتوان استفاده کرد. یکی از این روشها استفاده از مکانیزم لنگ میباشد.
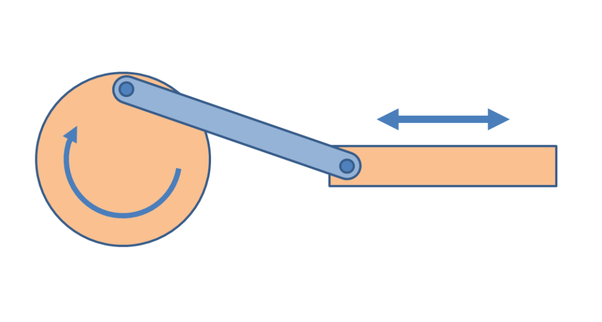
در ساخت این ربات دوپا برای ساخت مکانیزم لنگ، تسمه مربوط به پای ربات را به صورت مفصل بر روی نقطهای بر روی سطح یک پولی یا کرنک متصل کنید. با انتقال نیروی موتور به محور کرنک ، انتهای تسمه (کف پای ربات) به صورت خطی، حرکت رفت و برگشتی انجام خواهد داد.
آموزش آنلاین ساخت ربات انسان نما ( ربات دوپا )
وسایل و قطعات مورد نیاز برای ساخت این سازه

مراحل ساخت
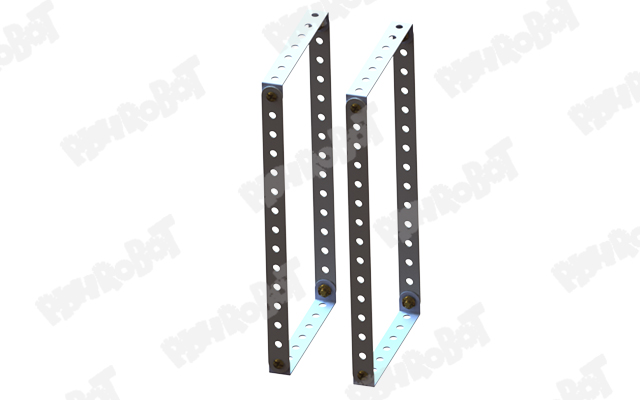
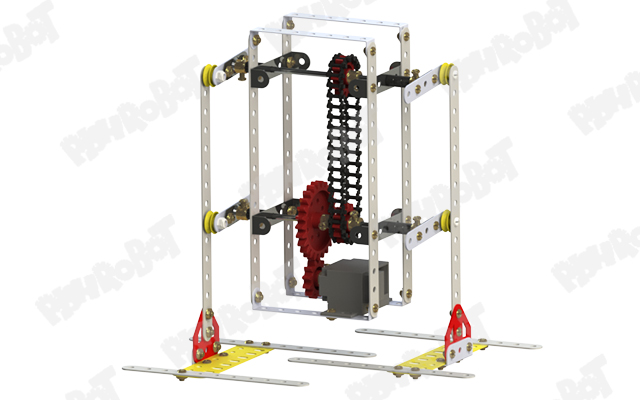
۱- ساخت شاسی
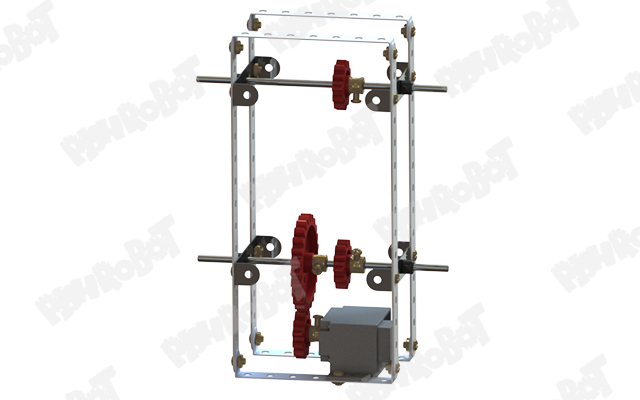
برای ساخت شاسی این سازه دو عدد قاب مستطیل شکل توسط تسمههای ۱۵ تایی و ناودانیهای ۷ تایی بسازید و سپس مطابق شکل توسط ناودانیهای ۵ تایی به یکدیگر متصل نمایید.

۲- نصب موتور
یک DC موتور را به قسمت پایین شاسی متصل کنید.
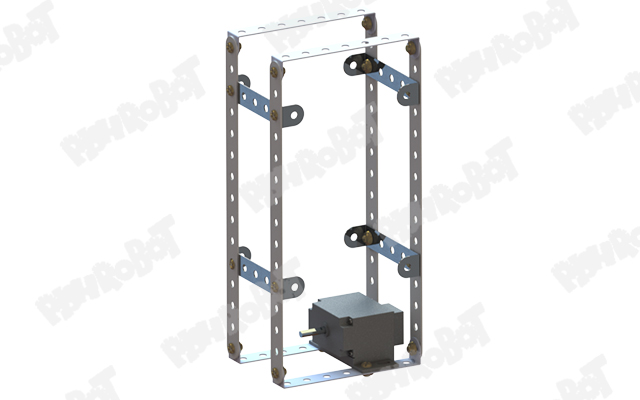
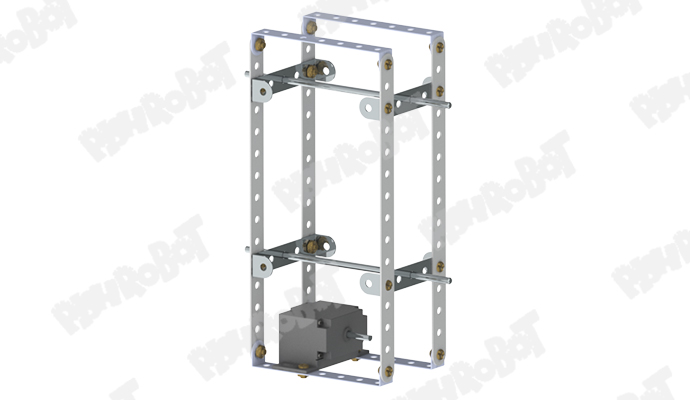
۳- نصب محورها
دو محور بلند را مطابق شکل از سوراخ وسط ناودانی های ۵ تایی عبور دهید.
۴- انتقال نیرو
برای ساخت یک گیربکس قدرتی با استفاده از چرخدندههای قرمز کوچک و بزرگ به محور بالای موتور انتقال نیرو انجام دهید.
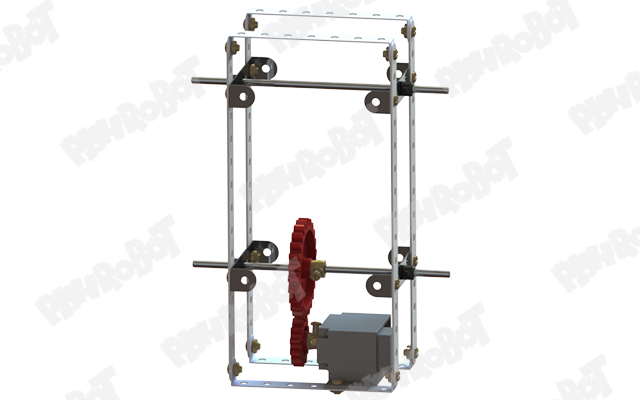
برای انتقال نیرو از محور پایین به محور بالایی، از آنجا که این دو محور باید با سرعت یکسان حرکت کنند از دو عدد چرخدنده قرمز کوچک استفاده نمایید.
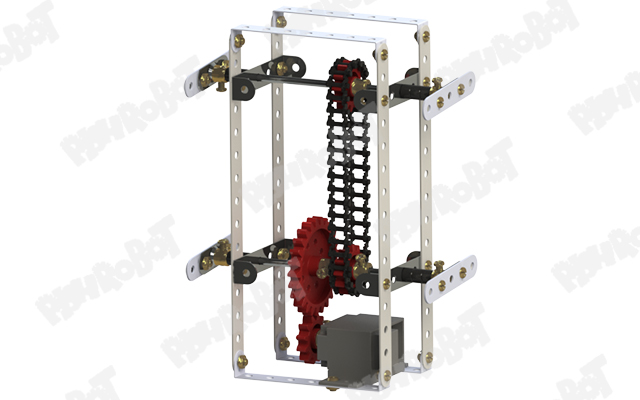
با نصب زنجیر بین محور بالا و محور پایین انتقال نیرو را تکمیل کنید.

۵- ساخت چهار عدد کرنک بزرگ
با نصب یک تسمه ۵ تایی به قطعه کرنک آن را بزرگتر کنید.
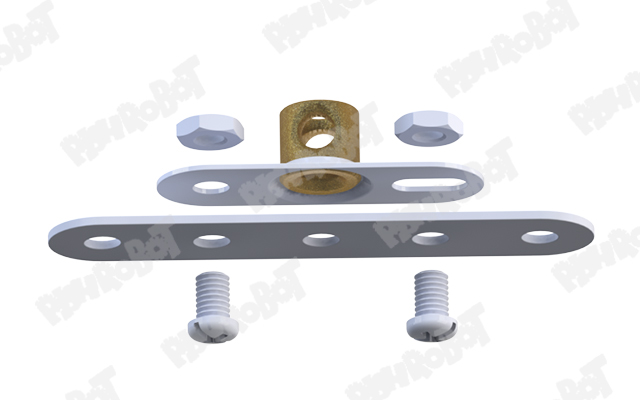
۶- نصب کرنکها بر روی محور
کرنکهای ساخته شده در مرحله قبل را به انتهای محورها متصل کنید.
توجه داشته باشید که به منظور عملکرد درست ربات، تمام چهار کرنک به صورت موازی با یکدیگر نصب شده باشند.
۷- ساخت پاها
برای حفظ تعادل ربات در هنگاه قدم برداشتن لازم است که کف پاهای ربات پهن باشند اما در استفاده از قطعات میتوانید از خلاقیت خودتان بهره ببرید.

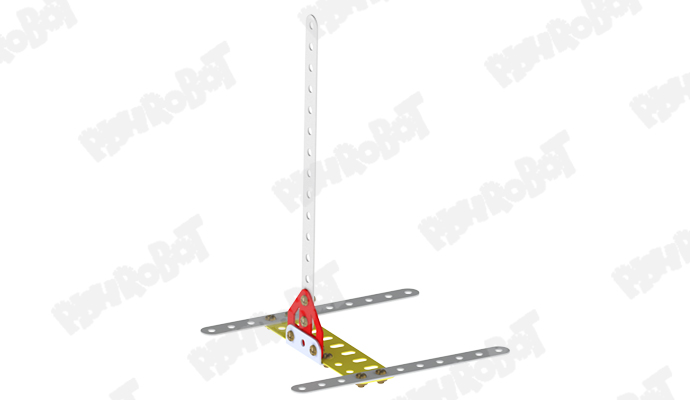
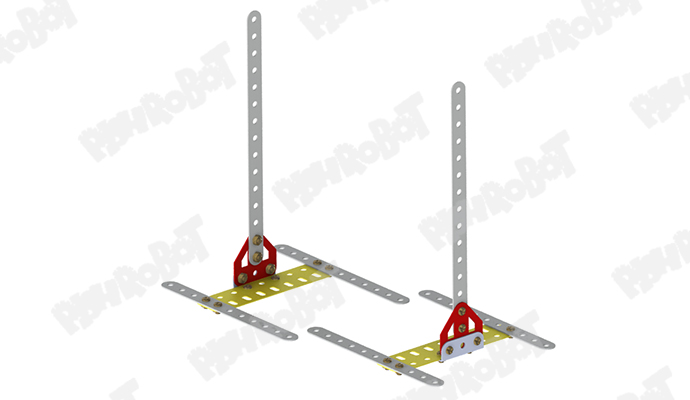
۸- نصب پاها
۹- خلاقیت و راه اندازی ربات
با خلاقیت و ذوق خودتان میتوانید برای این ربات دست، سر یا پوشش دلخواه خودتان را بسازید.
همچنین برای راه اندازی ربات انسان نمای خود میتوانید از پاورپک یا ریموت کنترل RC3 استفاده نمایید.
جهت دریافت مشاوره رایگان یا ثبت نام کلاس، شماره تماس و نام و نام خانوادگی فرزند خود را ارسال فرمایید تا کارشناسان آموزشی پیشروبات با شما تماس بگیرند.




بسیار عالی ولی چرا کج حرکت میکنه
چون کرنک باعث بالا و بایین شدن پاها میشوند و باید ربات کج شه تا حرکت کنه
عالی و حتی با یکم دیگر ابزار می تونیم دست هم به آن اضافه کنیم
اون وقت تقریبا تکمیل میشه
ایده خیلی خوبیه. اگر بهش دست اضافه کردی، به طوری که دست ها هم میتونستند حرکت کنند حتما فیلم سازت برامون بفرست. فکر میکنم خیلی عالی بشه.
برای ساخت دست متحرک برای این ربات، از مراحل ساخت این ربات انساننمایی که لینکش برات گذاشتم میتونی استفاده کنی
https://land.pishrobot.com/آموزش-ساخت-ربات/p/ربات-انسان-نما/