ربات کرم خاکی
2018-03-19
لرزهنگار
2018-12-22ربات انساننما

ربات انسان نما
رباتهای انساننما طراحی و ساخته شدهاند تا از نظر ظاهر و مکانیزمهای حرکتی و حتی رفتاری شبیه انسان باشند. این رباتها با اهداف مختلفی ازجمله تعامل با ابزار و محیط های انسانی ساخته میشوند. رباتهای انسان نما ممکن است فقط بخشی از بدن را شامل شوند، مثلاً فقط پایین تنه، بالا تنه و یا فقط صورتک رباتیکی باشند.

اما ویژگیهای این نوع از ربات ها تنها مربوط به حرکات شبیه سازی شدهی بدن انسان نیست، بلکه شاخه ای از علوم به نام علوم شناختی (Cognitive Science) وجود دارد که بر مطالعه روی چگونگی یادگیری مهارتهای ادراکی و حرکتی انسان بر مبنای اطلاعات حسی (اطلاعاتی که از راه حواس پنج گانه از محیط دریافت میکنیم) تمرکز دارد. این دانش به توسعه ی مدلهای محاسباتی مربوط به رفتارهای آدمی و پیاده سازی آنها به صورت برنامه نویسی کامپیوتری برای هوشمندسازی رباتهای انسان نما کمک میکند و روز به روز در حال گسترش است. به این معنا که بتوان این رباتها را به گونه ای برنامه نویسی کرد که هر کدام از آنها مانند کودکان بتوانند طبق تجربیات و ادراکاتی که از محیط خود بدست می آورند چیزهای مختلفی را بیاموزند. برای مثال کودکی که برای اولین بار توپی را به دیوار پرتاب میکند و توپ باز میگردد یاد میگیرد که چیزی به مفهوم بازتاب وجود دارد.
از سالهای بسیار قدیم، تقریباً از دورهی شروع عصر ماشین درغرب (اواخر قرن 19 و اوایل قرن 20 میلادی) و قبل از استفاده از واژه ربات، مهندسین و دانشمندان، ایدههایی دربارهی ساخت ماشینهای مکانیکی انسان نما در ذهن خود میپروراند. به صورتی که گاهی این آدمک های مکانیکی دستمایهی فیلم های علمی تخیلی آن زمان نیز قرار میگرفتند به طوری که حتی ربات انسان نما، سنبل عصر ماشین قرار گرفت.
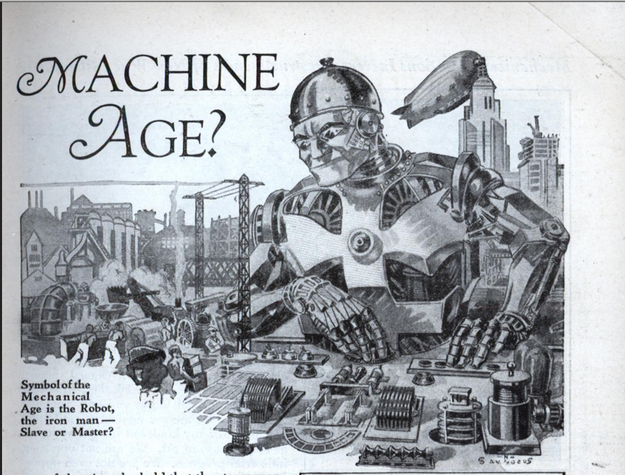
یک انسان ماشینی (رباتیکی)، سنبل عصر ماشین و سلطه ماشینها برانسان (۱۹۱۹)

ربات نوازندهی ترامپت که توسط نوازنده آلمانی فردریش کفمن ساخته شد (۱۸۸۵)
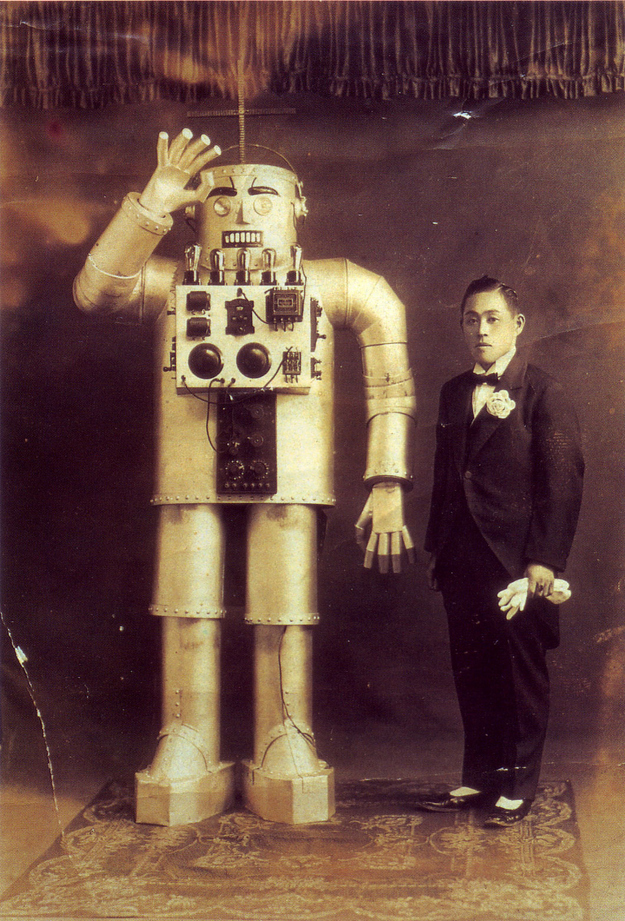
یاسوتارو میتسویی و ربات انساننمایش که از جنس استیل بود (۱۹۳۲)
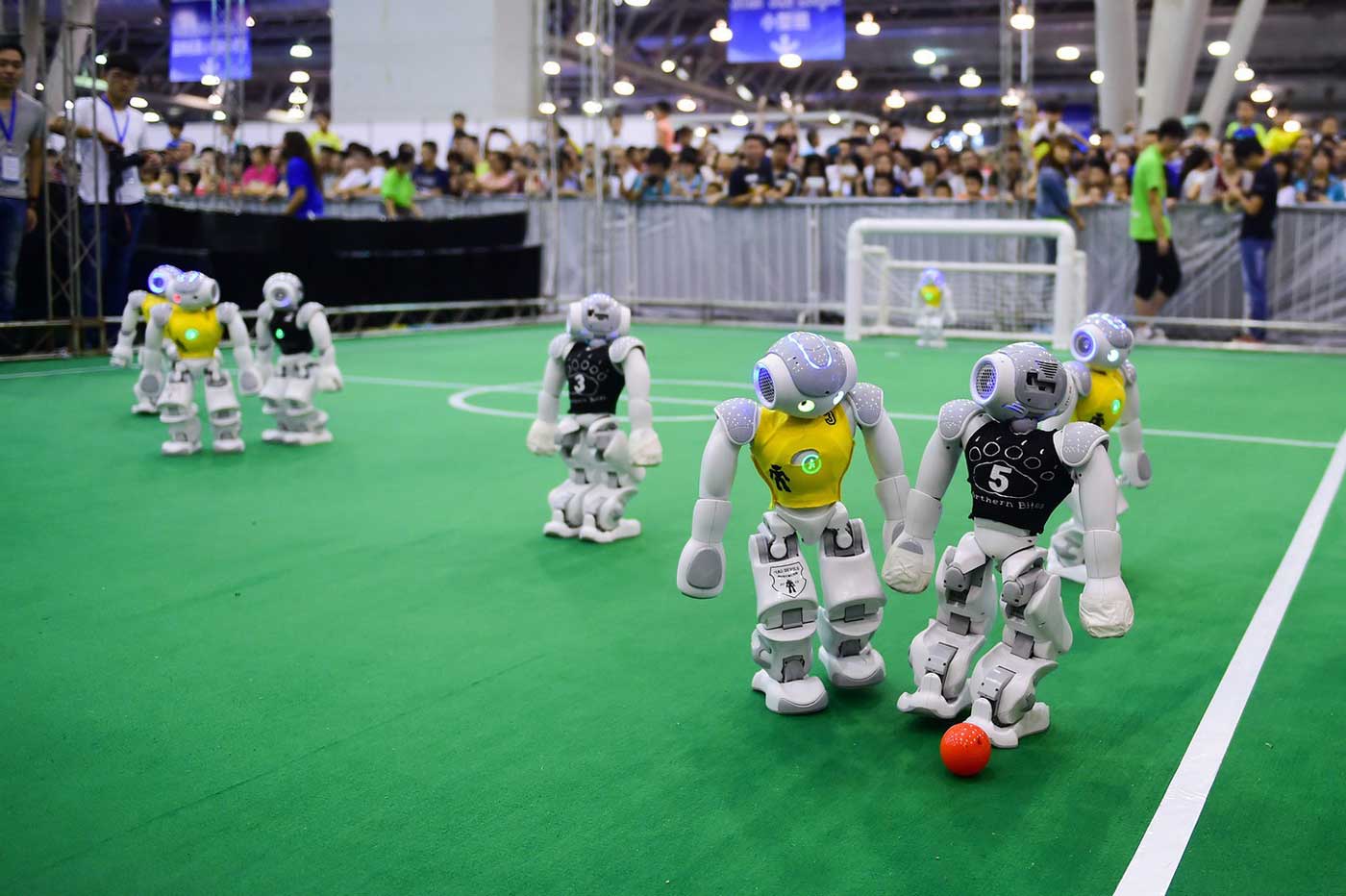
هدف از ارتقاء و توسعه تکنولوژی ربات های انسان نما، جایگزین کردن آنها برای انجام وظایف انسانی مانند دستیاری، پرستاری از بیماران و سالمندان، مراقبت و آموزش کودکان و کار در محیط های خطرناک یا آلوده میباشد. برای رسیدن به این اهداف و توسعهی دانشهای مرتبط، همه ساله رقابتهای متفاوتی در زمینه ربات های انساننما برگزار میشود تا هرسال با بالا رفتن سطح مسابقات تیمهای شرکت کننده نیز کاراییهای ربات های خود را افزایش دهند. از میان این رقابتها به چند رقابت معتبر اشاره خواهیم کرد:
RoboCup
بخش مسابقات فوتبال ربوکاپ در دو نوع ربات های چرخدار و ربات های انسان نما میباشد و هدف نهایی و دراز مدت این مسابقات، پیشرفت در زمینه رباتهای انسان نما به منظور انجام مسابقه فوتبال بین تیم ربات های انسان نما و تیم منتخب انسانها در آینده (تا سال 2050) است. این رقابتها از سال 1997 به صورت سالانه پیگیری میشود. انتخابی این مسابقات نیز در ایران با نام مسابقات ایران اپن (IranOpen) در ابتدای هر سال در تهران برگزار میشود.
FiraCup

مسابقات فیراکاپ جهانی در سه رشته ی چالشهای رباتهای چرخدار، رباتهای پروازی و المپیک رباتهای انسان نما انجام میشود. المپیک رباتهای انساننما شامل مراحلی چون وزنه برداری، دوسرعت، ضربات پنالتی، تیراندازی و راگبی میباشد. دانشگاه صنعتی امیرکبیر نیز انتخابی این مسابقات در ایران را به عهده گرفته است.

پیشروبات هر سال با برگزاری کلاسها و دوره های آمادگی برای مسابقات فیرا کاپ و روبوکاپ، دانش آموزان علاقه مند و مستعد را هدایت و حمایت میکند.
از اواخر قرن بیستم قدمهای بزرگی در ساخت رباتهای انسان نما برداشته شد و نتیجه آن تولید تعدادی ربات انسان نمای منحصر به فرد توسط چند شرکت مطرح در زمینه تکنولوژی است که در ادامه با برخی از ممتاز ترین آن ها آشنا خواهیم شد.
Asimo
آسیمو نام ربات انسان نمایی است که در سال 2000 توسط شرکت هوندا (Honda) در ژاپن ساخته شده است. آخرین نسخه این ربات 130 سانتی متر قد و 48 کیلو گرم وزن و در مجموع 57 درجه آزادی دارد. همچنین آسیمو میتواند توسط سیستم وایرلس و دستورات صوتی نیز کنترل شود و قابلیت هایی نظیرشناسایی محیط و اشیاء در حال حرکت و تشخیص صدا و چهرهی افراد به تعامل او با انسان کمک بسیاری می کند. دو سنسور لیزری و مادون قرمز نیز در کمر ربات برای تشخیص سطح زمین در هنگام راه رفتن روی پله به کار گرفته شده است. همچنین آسیمو توانایی صحبت با انسان به چندین زبان متفاوت و به خاطر سپردن چهرهی افراد را دارد و توسط دو سنسور التراسونیک موانع را در پیش رو و پشت سر خود شناسایی میکند.
Atlas

شرکت آمریکایی بوستون داینامیکس (Boston Dynamics) که سابقه درخشان و طولانی در طراحی و ساخت ربات های حیوان نما دارد، ربات انسان نمای اطلس رادر سال 2013 عرضه کرده است. این ربات با 1.5 متر قد، 75 کیلوگرم وزن و ۲۸ مفصل، از موتور های هیدرولیکی بهره میبرد. طبق گفتهی بوستون داینامیکس این ربات با اهداف غیرنظامی از جمله به کار گیری در عملیات های جستجو و نجات طراحی و ساخته شده است.
Sophia
سوفیا یک ربات انسان نمای اجتماعی است که توسط یک شرکت هنگ کنگی به نام هنسون رباتیک (Handson Robotics) ساخته و در آوریل 2015 راه اندازی و رونمایی شد. ویژگی منحصر به فرد این روبات توانایی بالای تغییر حالات چهره (۶۲ حالت مختلف) میباشد و همین ظاهر و رفتارهای انسانی او موجب شهرت و تفاوت زیاد او نسبت به ربات های انسان نمای دیگر است. از دیگر قابلیت های این ربات میتوان به برخورداری از هوش مصنوعی، پردازش اطلاعات تصویری و قابلیت تشخیص احساسات مخاطب از روی حالت چهره اشاره کرد.

Surena

ربات انسان نمای سورنا ۳ که در قالب طرحی ملی توسط آزمایشگاه CAST دانشگاه تهران و با همکاری چند دانشگاه معتبر دیگر ایرانی طراحی و ساخته شده است در سال ۲۰۱۴ مورد رونمایی قرار گرفت. این ربات با ۹۸ کیلوگرم وزن و ۱۹۰ سانتی متر قد یکی از بلند قامت ترین ربات های انسان نما در دنیاست. این ربات با داشتن ۳۱ درجه آزادی و بهره بردن از سروو موتور های هوشمند Dynamixel در دستان خود دارای قابلیت هایی از جمله حرکت روی سطح شیب دار و بالارفتن از پله میباشد. تشخیص و تعقیب صورت انسان های در حال حرکت و همچنین تکلم به زبان فارسی از توانایی های دیگر این ربات انسان نمای ایرانی است.
Pepper
در سال ۲۰۱۴ شرکت سافت بانک (الدباران سابق) ربات انسان نمای پپر (pepper) را با 1.2 متر قد، 28 کیلوگرم وزن و ۲۰عدد موتور معرفی کرد. پپر با استفاده از پردازش تصویر و پردازش صدا میتواند احساسات مخاطبش را تشخیص دهد. برای مثال اگر خوشحال باشید، در شادی شما سهیم خواهد شد و اگر ناراحت یا عصبانی باشید شما را آرام خواهد کرد. پپر برای برقراری ارتباط با انسانها و تقویت مهارت های اجتماعی آنها ساخته شده است و تا به حال در بسیاری پست ها، مثلاً به عنوان مسئول پذیرش در بیمارستان و درمانگاه در ژاپن استفاده شده است. همچنین از پپر میتوان برای آموزش برنامه نویسی و برگزاری دوره های انسان نما درمدارس و دانشگاه ها استفاده کرد. این ربات با اتصال به اینترنت همواره از جهت اطلاعات و اخبار به روز خواهد بود و از طریق تبلتی که بر روی سینه اش نصب شده میتواند با مخاطبش ارتباط بیشتری برقرار کند. به طور خلاصه میتوان گفت که پپر ربات انسان نمایی است که دوست دارد با شما ارتباط برقرار کند، عادت ها و سلایق شما را بشناسد و خود را با ویژگی های شخصیتی شما سازگار کند. شرکت پیشروبات به عنوان نماینده ی سافت بانک، اولین و تنها شرکتی است که این محصول جذاب را در ایران به فروش میرساند.

تعدادی از ربات های انساننما نیز بیشتر استفادهی آموزشی و مسابقاتی دارند.
از محبوبترین آنها میتوان به رباتهای انسان نمای NAO, Robobuilder, Bioloid (Premium & Comprehensive), Robotis Mini, Darwin و غیره اشاره کرد که همگی توسط شرکت پیشروبات عرضه و آموزش داده می شوند.

موتورها و عملگرهای متفاوتی درساخت ربات های مختلف استفاده می شود ازجمله موتورهای بنزینی ، عملگرهای پنوماتیک (بادی)، عملگرهای هیدرولیک (اغلب روغنی) و انواع موتورهای الکتریکی. موتورهای الکتریکی انواع مختلفی دارند. اما یکی از پرکاربرد ترین آن ها در ساخت ربات های انسان نما سرو موتورها (Servo motors) هستند. تفاوت سرووها با DC موتورها، قابلیت اجرای دستور و کنترل موقعیت شفت موتور (ازنظرزاویه) میباشد و به همین دلیل این نوع از موتوهای الکتریکی استفاده ی زیادی در بازوهای رباتیک و مفاصل ربات های انساننما دارند. سروو موتورهای DC علاوه بر دی سی موتور و گیربکس قدرتی، دارای سنسور (اغلب به صورت پتانسیومتر) برای تشخیص موقعیت شفت خروجی موتورمی باشند. سرووموتورهای دی سی دارای سه رشته سیم هستند که از دوتای آن برای تأمین برق و از سیم سوم برای فرستادن دستورات از کنترلر به موتور استفاده میشود. در سروموتورهای پیشرفته داینامیکسل از سیم سوم هم برای ارسال فرمان به سرووموتور و هم دریافت اطلاعات از موقعیت، سرعت و گشتاور شفت، دمای موتور و ... استفاده میشود.
در ربات انسان نمایی که خواهید ساخت ازدو عدد موتور DC برای جابجایی ربات بر روی زمین، یک موتور DC دیگر برای چرخش کمر و دو سروو موتور برای کنترل حرکت دست ها استفاده میکنیم تا دست های رباتمان دقیق تر حرکت کنند.
آموزش آنلاین ساخت ربات
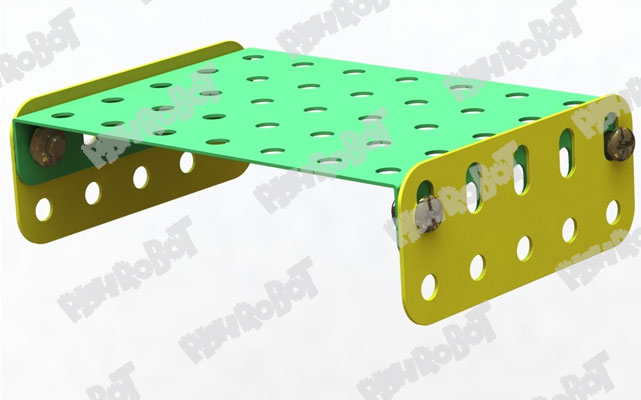
۱- ساخت شاسی پایین تنهی ربات (موبایل ربات)
اتصال صفحه سبز لبه دار به صفحات زرد رنگ
از ناودانی برای صلب کردن شاسی میتوان استفاده کرد

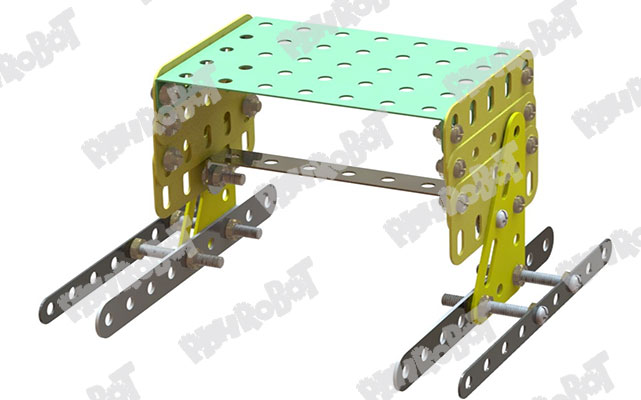
۲- یاتاقان سازی
نصب تسمه های فلزی به روش موازی سازی به منظور یاتاقان سازی برای محورها
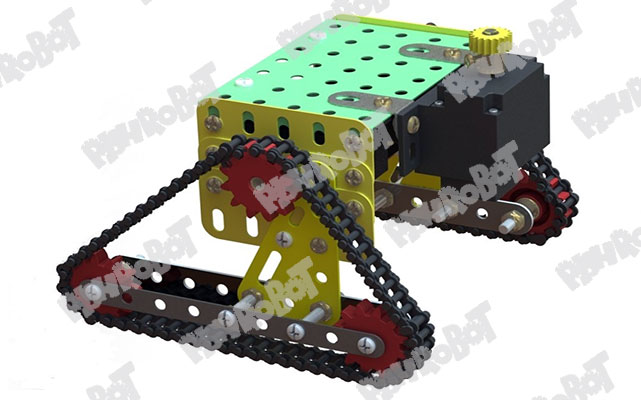
۳- تکمیل موبایل ربات
نصب دو عدد DC موتور برای حرکت موبایل ربات و نصب محور و چرخ زنجیر برای انتقال نیرو
استفاده از زنجیر برای تکمیل انتقال نیروی موبایل ربات و نصب DC موتور سوم برای چرخش قسمت کمر ربات

۴-نصب کفگرد
نصب قسمت ثابت کفگرد به موبایل ربات با پیچ و مهره
نصب صفحه سبزلبه دار کوچک روی قسمت میانی کفگرد برای اتصال بالاتنه به موبایل ربات


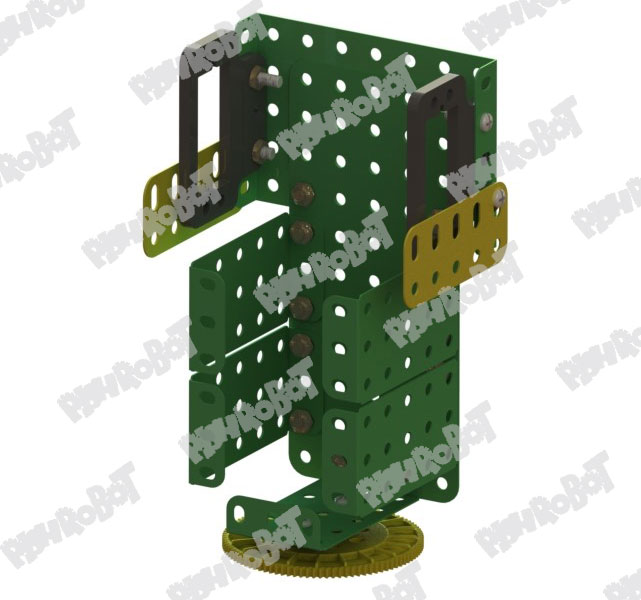
۵- ساخت بالاتنه انساننما
بالاتنه ربات را میتوان با استفاده از صفحات سبز و یا هر قطعه دیگری ساخت
در این مرحله فریم های مربوط به سروو موتور ها نیز نصب میشوند

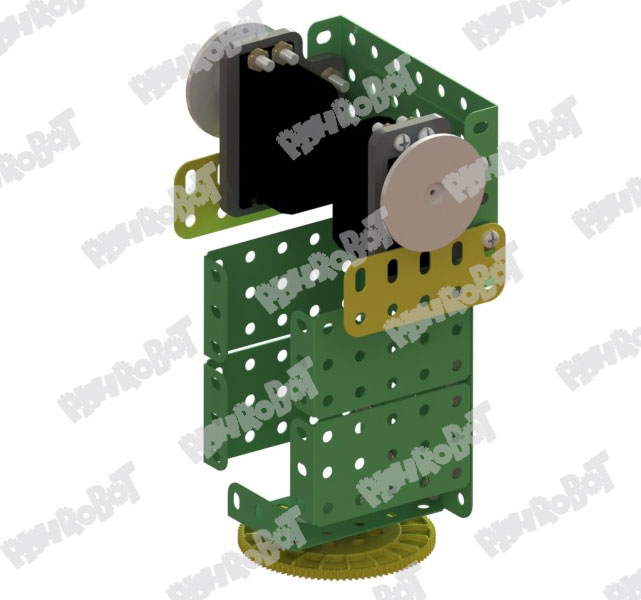
۶- نصب سروو موتورها و تکمیل بالاتنه ربات
دو عدد سروو موتور به همراه هورن برای حرکت دست های انساننما بر روی فریم ها نصب میشوند

۷- ساخت و نصب دست ها
ساخت دستها توسط تسمه های فلزی و به روش موازی سازی
نصب دست های ساخته شده بر روی هورن سروو موتورها


۸- ساخت سر ربات (سلیقهای)
شما میتوانید سر ربات را به سلیقه و خلاقیت خودتان بسازید و سپس بر روی تنه انساننما نصب کنید

۹- تکمیل انساننما
سه قسمتی که در مراحل قبل ساختید (موبایل ربات، بالاتنه و سر ربات) را به یکدیگر وصل کنید تا انسان نمای شما کامل شود. سپس برای کنترل و هدایت ربات، گیرنده ریموت را بر پشت ربات (مثل یک کوله پشتی) نصب کنید. در صورت علاقه میتوانید با نصب یک کنترلر PRB-200 در پشت ربات و استفاده از چند سنسور، ربات خود را مانند بسیاری از ربات های انسان نما هوشمند کنید.





سلام تفاوت krc و prb 200 چی هست و اینکه نحوه برنامه نویسی و قابلیت هاشون چقدر تفاوت دارن ؟
سلام، از توجه شما سپاسگزاریم.
از لحاظ نرم افزاری محیطشون خیلی شبیه هم هست.
از لحاظ سخت افزاری متفاوت هستند. مثلاً PRB-200 میتونه با ۴ موتور کار کنه اما KRC با ۲ موتور.
با تشکر
ربات خیلی خوبی است
آیا می تونیم به جای چشم های پیچی چشم های دوربین بگذاریم
بله، یک یا دو دوربین کوچک میشه رو سر ربات نصب بشه.
از کجامی تونیم وسایلشو تهیه کنیم
سلام، خوشحالیم که از این سازه خوشتون اومده.
برای خرید کیت های مربوط به این سازه لطفا به لینک زیر مراجعه فرمایید:
https://shop.pishrobot.com/product-category/robots-and-robotic-kits/robot-construction-kits/kairobot/
با هر کدوم از این کیتها میشه سازههای زیادی ساخت.
سلام بسیار عالی بود موفق باشید
سلام، خیلی ممنون. سلامت باشید.
آرزو دارم بتوانم رباط بسازم من
آرزوتون دور از انتظار نیست. به راحتی میتوانید به آن برسید.
سلام واقعا ربات عالی هستش
من کلاس هشتم هستم و در جشنواره خوارزمی شرکت کردم برای این جشنواره میخوام که یک ربات رو بسازم ولی اصلا سر رشته ای تو این کار ندارم نمیدونم چه وسایلی میخواد اگه زحمتی نیست لطفا میشه بگین خرج درس کردنش و….
چقدره
با تشکر
سلام. تا بحال دانش آموزان مستعد بسیاری مانند شما با گذراندن دورههای آموزشی پیشروبات یا استفاده از مشاورههای ما توانستهاند در مسابقات معتبر داخلی و بین الملی مقام کسب کنند. بنابراین بهتون پیشنهاد میکنم حتما با شرکت پیشروبات تماس بگیرید تا از تجربه و مشاوره کارشناسان ما در این زمینه استفاده کنید.
شماره تماس:۰۲۱۸۸۶۵۴۲۹۹
و همچنین اگه آموزش ویدئویی رو دارین لطفا اینجا بارگزاری کنید ممنون
اگر به دنبال فیلم آموزشی و آموزش مجازی در زمینه رباتیک یا کدنویسی هستید با شماره ۰۲۱۸۸۶۵۴۲۹۹ تماس بگیرید تا همکاران ما شما را راهنمایی کنند.
سلام کنترلیه رباتتون؟
سلام برشما. رباتی که درفیلم مشاهده فرمودید توسط ریموت کنترل RC3 هدایت شده. اما این قابلیت وجود دارد که با نصب کنترلر PRB-300B و استفاده از زبان برنامه نویسی Scratch بتوانید به صورت دلخواه این ربات را برنامه نویسی و کنترل نمایید.
برای آشنایی با ریموت کنترل RC3 و کنترلر PRB-300B به لینک های زیر مراجعه فرمایید:
https://shop.pishrobot.com/product/rc3-remote-controller/
https://shop.pishrobot.com/product/prb-300b-controller/
همچنین اگر به برنامه نویسی و کدنویسی رباتها علاقه دارید پیشنهاد میکنم سری به لینک زیر بزنید:
https://www.pishrobot.com/learn-to-code/
سلام وقت بخیر
یک سوال داشتم ریموت کنترل RC3 میتونه چهار موتور رو کنترل کنه ولی این ربات پنج تا موتور داره چطور میتونه پنج تاش رو با هم کنترل کنه