
جزیره گنج
2019-01-31
یدککش هواپیما
2019-09-03طنابنورد
طناب نورد
در حوزه فناوری رباتیک، گونه ای از ربات ها وجود دارند که برای حرکت و یا بالا رفتن از ریسمان یا کابل طراحی و ساخته میشوند. این ربات ها که به ربات های طناب نورد یا ربات های کابلی مشهورند می توانند مکانیزم های حرکتی متفاوتی داشته باشند. البته رباتهای طناب نورد و کابلی یک تفاوت مهم با هم دارند. در ربات های طناب نورد، ربات روی طناب یا کابل ثابت حرکت میکند اما در ربات های کابلی، کابل ها یا ریسمان ها هستند که به کمک موتورها یا سایر عملگرها ربات را به حرکت در میآورند.

ربات های طناب نورد و ربات های کابلی، دارای کاربرد های متفاوتی هستند که از مهم ترین آن ها می توان به فیلم برداری از صحنه های ورزشی و سینمایی اشاره کرد، همچنین با حرکت این ربات ها بر روی سیم های برق از آن ها برای چک کردن و عیب یابی سیم های فشار قوی برق نیز استفاده میشود. افزون بر این توانایی بالارفتن از طناب یکی از قابلیت های مهم در یک ربات انسان نمای امداد گر محسوب شود.
نیروی اصطکاک
اصطکاک (Friction) نیرویی است که در سطح تماس دو جسم متحرک (مایع یا جامد) به وجود می آید و در مقابل حرکت آنها نسبت به یکدیگر ایجاد مقاوت میکند. این نیرو در بعضی شرایط مانند روشن کردن کبریت، کوهنوردی در برف و یخ و یا مکانیزم ترمز وسایل نقلیه نیرویی بسیار مفید و در بعضی شرایط نظیر حرکت قطعات مکانیکی موتور نسبت به یکدیگر و یا حرکت محور ها در یاتاقان ها مزاحم است و موجب اتلاف انرژی (به صورت ایجاد گرما) و کاهش سرعت نسبی دوجسم می شود. بنابراین شناخت عواملی که بر افزایش و کاهش این نیرو موثر هستند، کمک بزرگی در طراحی دستگاه ها، ربات ها و حتی وسایل ورزشی خواهد داشت که در ادامه به معرفی مهمترین این عوامل خواهیم پرداخت.
شکل سطح:
هر چه قدر سطح تماس دو جسم صاف تر و صیقلی تر باشد اصطکاک کمتری بوجود می آید و هرچقدر زبر تر و ناهمواری بیشتر باشد اصطکاک نیز افزایش می یابد. یکی از علت های استفاده از آسفالت برای کفپوش خیابان ها و جاده ها نیز زبر بودن آن است.
جنس سطح:
در صورت صیقلی بودن، سطوح سخت تر مانند فلزات اصطکاک کمتر و سطوح نرم تر مانند سطوح لاستیکی اصطکاک بیشتری خواهند داشت و به همین دلیل است که در چرخ وسایل نقلیه از تایرهای لاستیکی برای بالابردن اصطکاک و جلوگیری از سر خوردن چرخ ها استفاده می شود.
نیروی عمود بر سطح:
نیروی اصطکاک رابطه مستقیمی با نیروی عمود بر سطح دارد و به همین دلیل است که در اتومبیل های مسابقه از بال عقب (Spoiler) استفاده میشود تا نیروی باد ماشین را به سمت زمین فشار دهد.
مساحت سطح تماس:
مساحت سطح تماس دو جسم نیز تأثیر مستقیم در افزایش و کاهش این نیروی مقاوم دارد و به همین دلیل است که دوچرخه های کوهستان نسبت به دو چرخه های جاده ای چرخ ها و لاستیک های پهن تری دارند تا از سر خوردن چرخ ها بر روی شن و زمین های گل آلود جلوگیری شود.
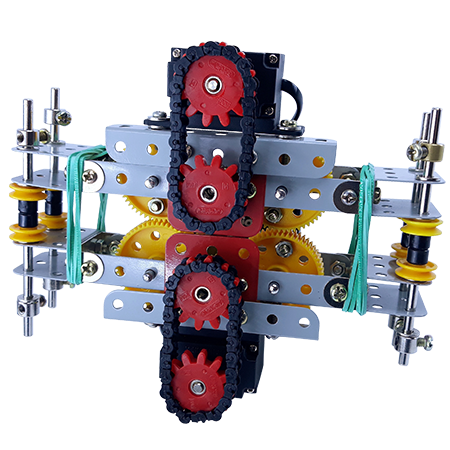
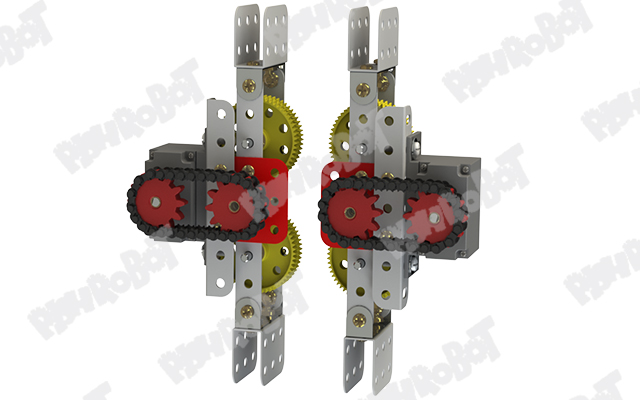
در ربات طناب نورد افزایش اصطکاک بین سازه و ریسمان کمک فراوانی به بالا رفتن از طناب و جلوگیری از سقوط سازه دارد. بنابراین در مکانیزم آن از چرخدنده های زرد سایز سه استفاده می کنیم تا سطح ناهموارتری نسبت به پولی ها در تماس با ریسمان به وجود آید. برای افزایش مساحت سطح تماس نیز چرخدنده ها را دو به دو به یکدیگر کوپل خواهیم کرد. همچنین برای افزایش نیروی عمود برسطح از کش یا فنر می توان استفاده کرد تا ریسمان بین چرخدنده ها فشرده شده اصطکاک بیشتری به وجود آید و مانع از سرخوردن به سمت پایین یا در جا چرخیدن چرخدنده ها شود.
آموزش آنلاین ساخت ربات
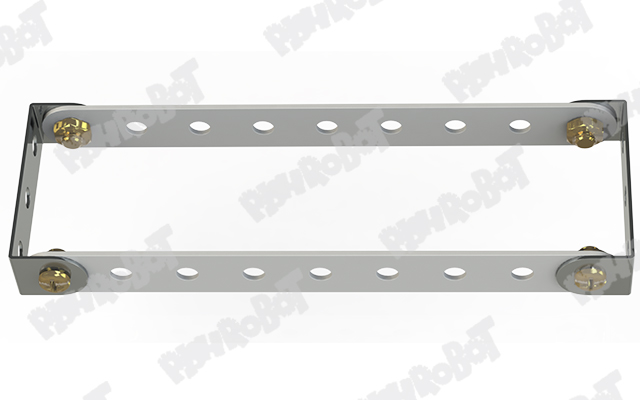
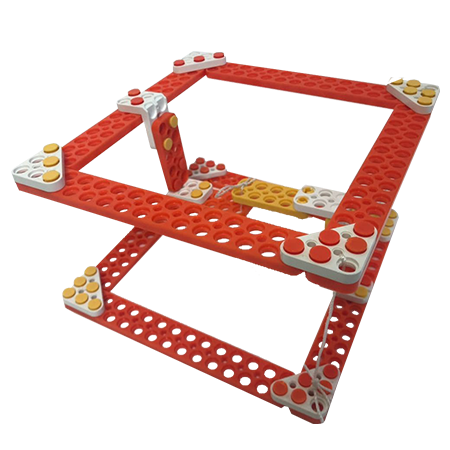
۱- ساخت شاسی ربات
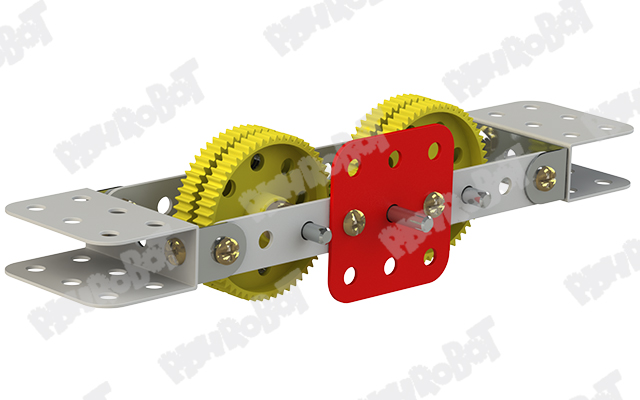
با استفاده از تسمه های فلزی و ناودانی یک شاسی قاب (مستطیلی) بسازید.
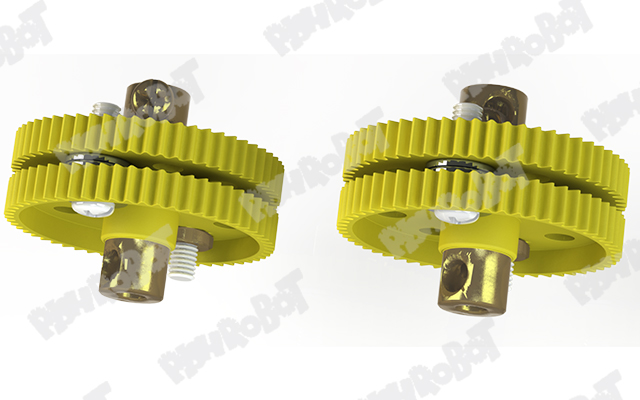
۲- ساخت غلطک هایی با اصطکاک بالا
اتصال چرخدنده های زرد سایز سه به منظور افزایش سطح تماس آن ها با ریسمان
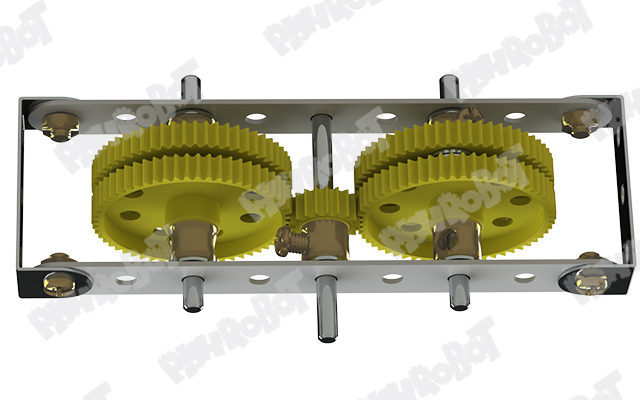
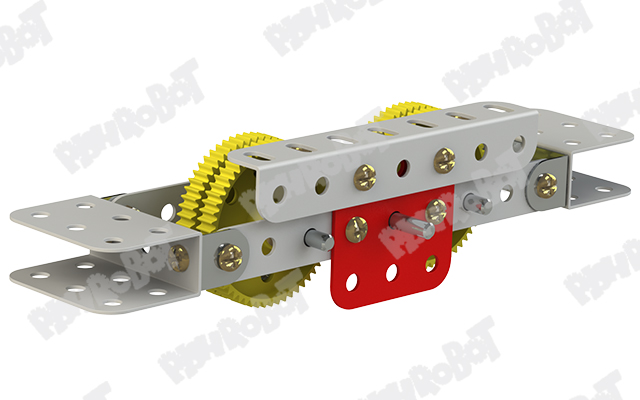
۳- ساخت گیرباکس قدرتی
به منظور افزایش قدرت ربات یک گیرباکس قدرتی (۱ به ۳) بسازید.
۴- یاتاقان سازی
نصب دو قطعه یاتاقان به دو طرف شاسی به منظور عبور محور ها

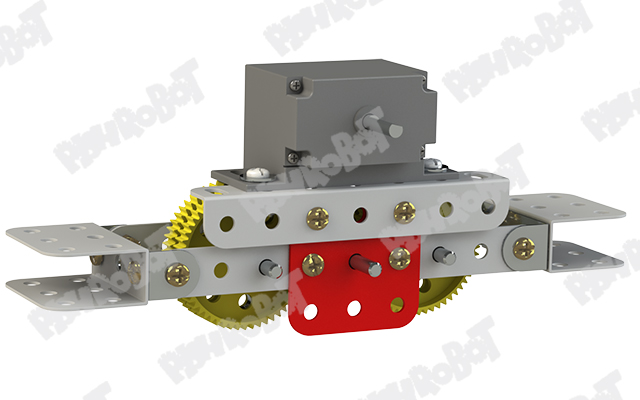
۵- نصب موتور
مرحله اول: نصب صفحه قرمز به شاسی
مرحله دوم: نصب نبشی به صفحه قرمز
مرحله سوم: نصب موتور بر روی نبشی
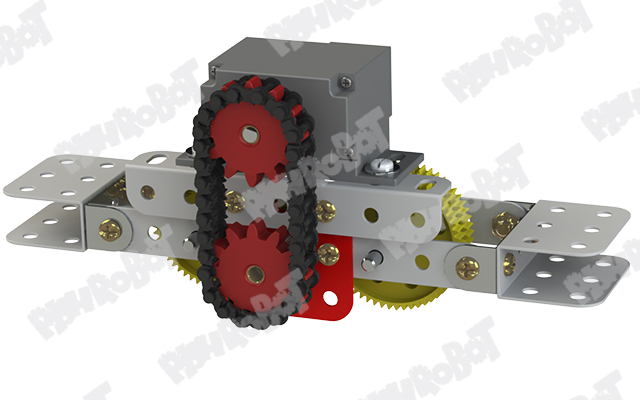
۶- انتقال نیرو
با نصب چرخدنده قرمز کوچک بر روی موتور و محور میانی، انتقال نیرو را توسط زنجیر انجام دهید.
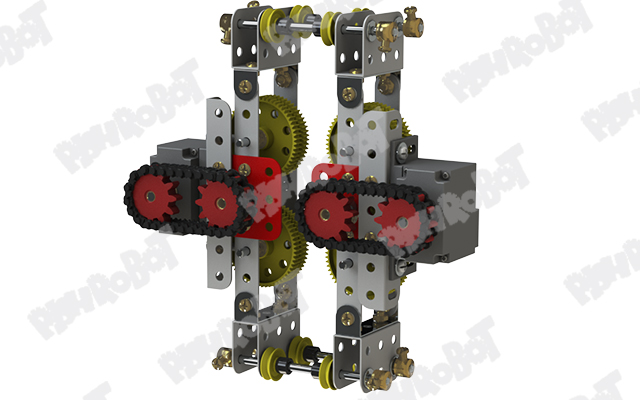
۷- ساخت نیمه دوم ربات
نیمه دوم ربات باید به صورت متقارن با نیمه ی اول ساخته شود.
۸- اتصال دو نیمه ی ربات به یکدیگر
با استفاده از محور ها و بوش های فلزی مطابق شکل دو نیمه ی متقارن ربات را به یکدیگر متصل کنید.
توجه داشته باشید که که اندازه محور و محل نصب بوش های فلزی به گونه ای باشد که دو قسمت ربات بتوانند در حد چند سانت نسبت به یکدیگر حرکت کنند.




سلام بنظر من گه خیلی خوب بود
ممنون
سلام، خواهش میکنم. لطفا اگه ساختین برامون بفرستین.
سلام خوب بود
سلام، خیلی ممنون از شما.
سلام اسم اون تسمه ها چیه و از کجا باید بگیرم
سلام رباتی که ساخته شده با استفاده از قطعات کای هست و همهی وسایل لازم برای ساخت ربات رو میتونید از فروشگاه پیشروبات تهییه کنید یا با شمارهی 88654299-021 تماس بگیرید.