ربات مثلثی نسخه ۲
2020-08-23
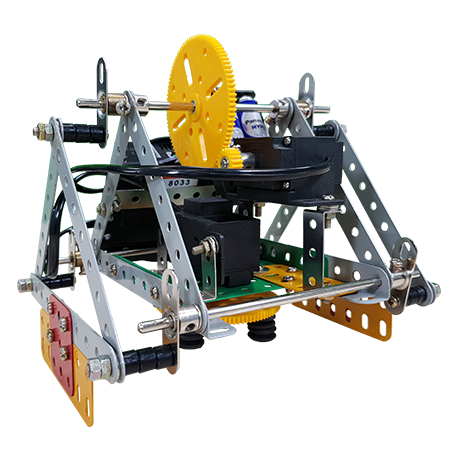
بالابر آکاردئونی
2021-04-10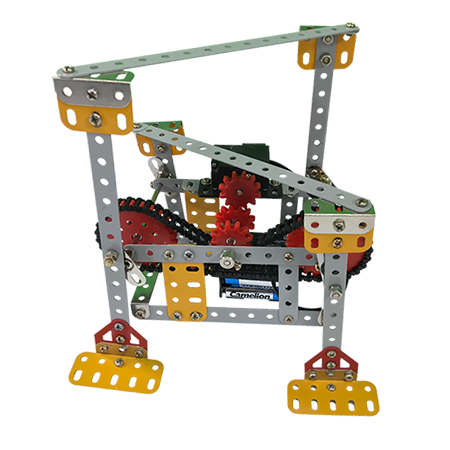
ربات چهارپا
سطح علمی
ترم ۲ و ۳ کای ربات
ارسال توسط
پیشروبات
نوع سازه
غیر هوشمند- کنترلی
اکثر رباتهای متحرک با استفاده از چرخهایشان جابجا میشوند. اما استفاده از ربات های چرخ دار نیازمند وجود زمین مسطح و یا جاده میباشد و حتی اگر مانند ربات کاوشگر از چرخهای مخصوص هم استفاده شود، جابجایی ربات به آرامی صورت میگیرد و ربات، چالاکی لازم را نخواهد داشت و به همین دلیل پژوهشگران حوزه تکنولوژی رباتیک به ساخت ربات دوپا، ربات انسان نما و ربات چهارپا توجه زیادی نشان دادهاند.
از آنجایی که حفظ تعادل بر روی چهارپا ساده تر از دوپا میباشد، رباتهای چهارپا قابلیتهای بیشتری برای حرکت بر روی سطوح ناهموار و بالا و پایین رفتن از موانع یا پلهها را دارند. همچنین به طور معمول در ساخت ربات چهارپا از حرکت حیوانات به خصوص از نحوه حرکت سگها و چهارپایان ایده گرفته میشود.
پیشرفته ترین ربات های چهارپا
Mule Robot

ربات چهارپای نیروی دریایی آمریکا که برای حمل تجهیزات نظامی در جبهههای نبرد استفاده میشود و میتواند ۱۸۰ کیلوگرم بار را به اندازه ۳۲ کیلومتر و بدون سوختگیری حمل کند.
Spot Mini

ربات چهارپا Spot-mini که از محصولات کمپانی Boston Dynamic میباشد با بهرهگیری از هوش مصنوعی و انواع سنسورها تواناییهای بالایی در تعامل با محیط و حرکات دارد.
آموزش آنلاین ساخت ربات چهارپا
با استفاده از پک آموزشی کای ربات میتوانید به راحتی بسیاری از سازهها و رباتهای مختلفی که در فیلمها و شبکههای اجتماعی میبینید را بسازید یا شبیه سازی کنید. اما نکته مهم در این باره انتخاب قطعات مناسب و آشنایی با مکانیزمهای مکانیکی مفید میباشد. ربات چهار پایی که در ادامه به مراحل ساخت آن خواهیم پرداخت تنها نیاز به یک موتور برای راه رفتن دارد. اما از آنجایی که نیروی یک موتور برای قدم برداشتن پاهای ربات کافی نیست، ساخت یک گیربکس ساده برای آن ضرورت دارد. همچنین برای تبدیل چرخش شفت موتور به قدم برداشتن و بالا و پایین رفتن پاهای ربات نیاز به یک مکانیزم مکانیکی برای تبدیل حرکت چرخشی به حرکت خطی (رفت و برگشتی) داریم. مکانیزم پیشنهادی ما مکانیزم لنگ نام دارد.
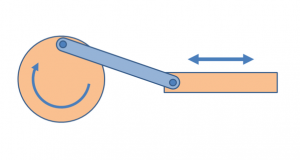
به منظور تبدیل حرکت چرخشی به حرکت خطی یا بالعکس از مکانیزمهای مکانیکی مختلفی میتوان استفاده کرد. یکی از این روشها استفاده از مکانیزم لنگ میباشد. برای ساخت مکانیزم لنگ یک تسمه را به صورت مفصل بر روی نقطهای بر روی سطح یک پولی یا کرنک متصل کنید. با انتقال حرکت شفت موتور به شفت کرنک ، انتهای تسمه به صورت خطی، حرکت رفت و برگشتی انجام خواهد داد.

مراحل ساخت ربات چهارپا
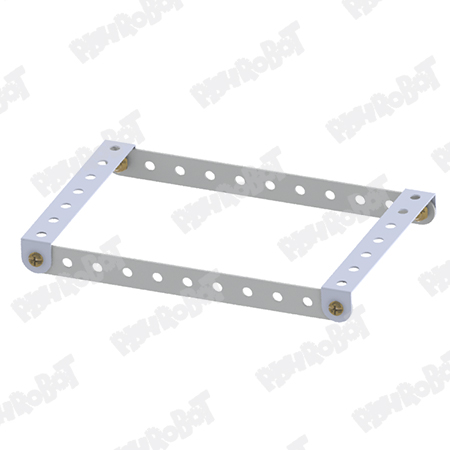
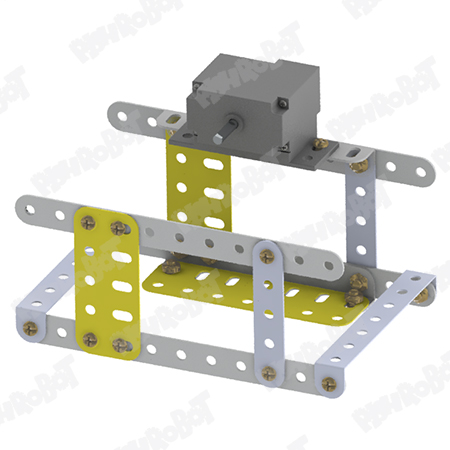
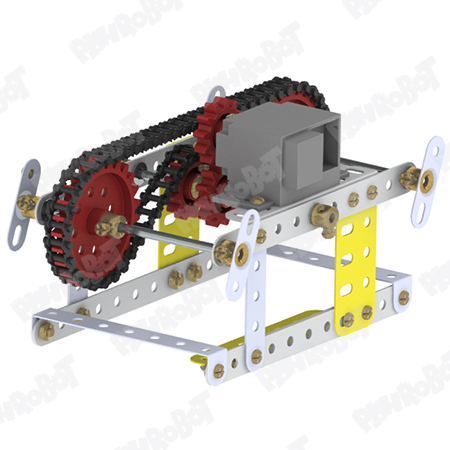
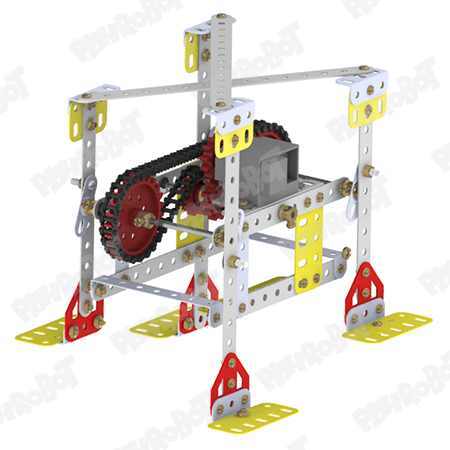
۱- ساخت شاسی
برای ساخت شاسی این ربات با استفاده از دو عدد تسمه ۱۱ تایی و دو ناودانی ۷ تایی یک قاب مستطیلی شکل بسازید.
دقت فرمایید که به منظور صلب شدن این شاسی حتما لبه ناودانیها بر روی تسمهها قرار گیرد.
۲- ادامه ساخت شاسی (یاتاقان سازی و ساخت پایه موتور)
برای تکمیل شاسی ربات چهارپا یک صفحه زرد ۵ تایی، نبشی ۷ تایی و یک تسمه ۵ تایی را به صورت همزمان به قابی که در مرحله پیش ساخته اید متصل نمایید.
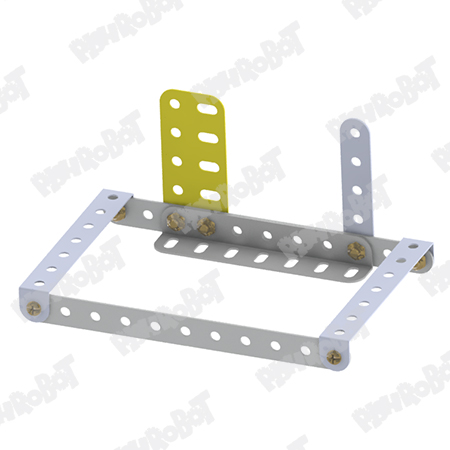
یک تسمه ۱۱ تایی و یک نبشی ۷تایی را به مرحل قبل اضافه کنید.
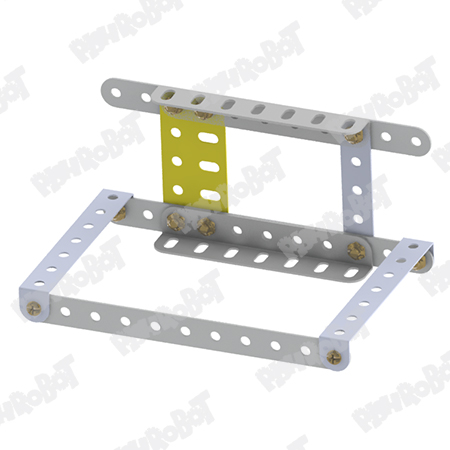
برای نصب شفت و ساخت گیربکس در مراحل آینده نیاز به یاتاقان سازی داریم. بنابر این به صورت متقارن یک تسمه ۱۱ تایی دیگر نیز در سمت دیگر شاسی مطابق با شکل نصب میکنیم. همچنین یک صفحه زرد هفت تایی نیز بر روی نبشی قسمت پایین نصب میکنیم. بنابر این در انتهای ساخت ربات چهارپا میتوانیم پاورپک و جاباتری را بر رویش نصب نماییم.
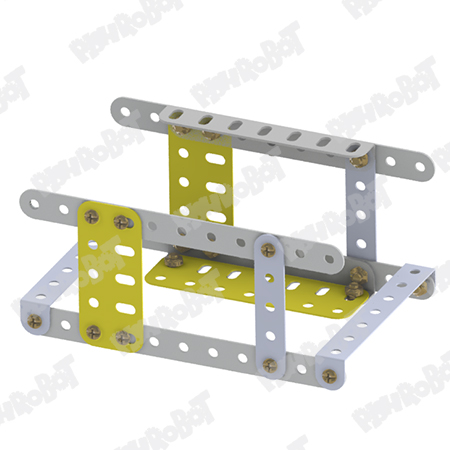
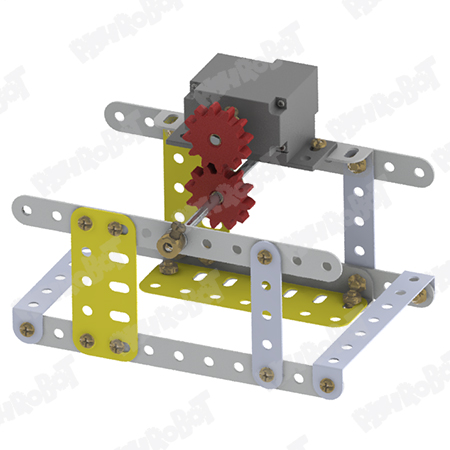
۳- نصب موتور
یک عدد DC موتور را بر روی نبشی و به صورتی که شفت موتور رو به داخل باشد نصب نمایید.
۴- ساخت گیربکس و انتقال نیرو
یک شفت از زیر موتور عبور دهید و توسط دو چرخزنجیر قرمز کوچک از موتور به محور انتقال نیرو نمایید.
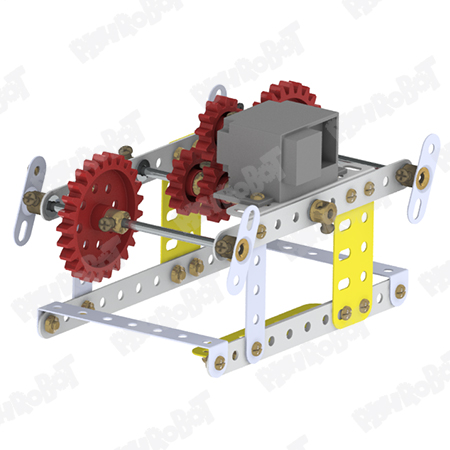
مطابق شکل، سه عدد چرخدنده قرمز دیگر را توسط محور به سازه اضافه میکنیم. دقت نمایید که به منظور افزایش قدرت ربات چهارپا، چرخدنده وسطه کوچک و دو چرخدنده انتهایی بزرگ باشند.
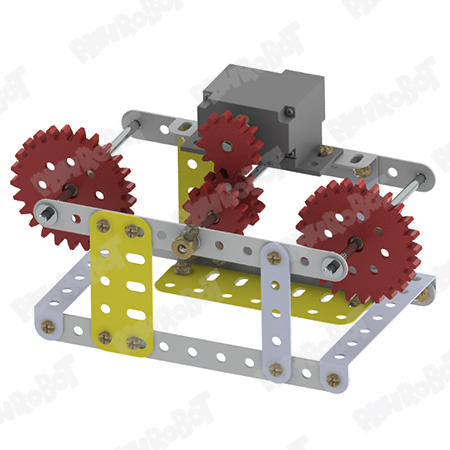
توجه نمایید که برای ساخت مکانیزم لنگ، حتما به دو سر محورهای جلویی و عقب ربات کرنک نصب نمایید. توجه داشته باشد که کرنکها به صورت قطری هم فاز باشند. همچنین کرنکهایی که بر روی محور مشترکی نصب شدهاند دارای ۱۸۰ درجه اختلاف فاز باشند.
۵- نصب زنجیر و تکمیل انتقال نیرو
بین محور وسط و دو محور انتهایی با زنجیر انتقال نیرو دهید.
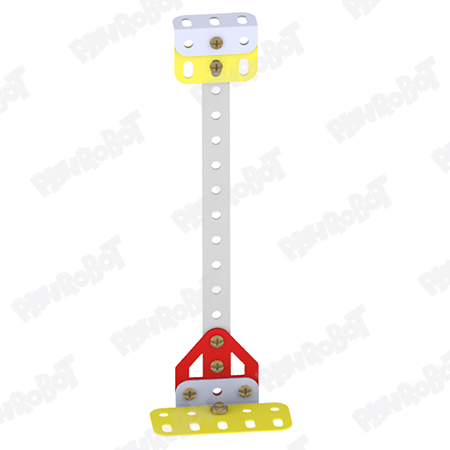
۷- ساخت پاها
در ساخت پاها توجه نمایید که طول هر چهار پا با یکدیگر برابر نیست. پاها به صورت دو به دو طول برابری دارند. پاهایی که طول یکسانی دارند از قسمت بالا به یکدیگر متصل میشوند.
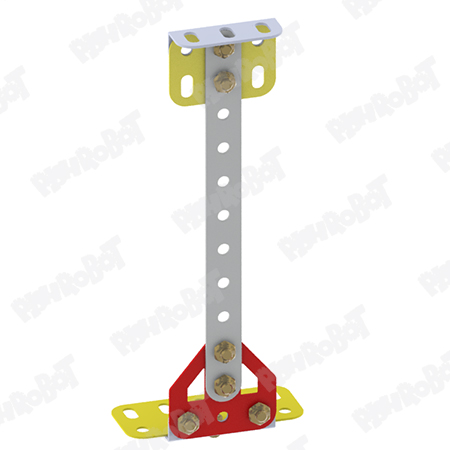
با استفاده از تسمه ۱۵ تایی و قطعاتی که در شکل ملاحظه می فرمایید دو عدد پا بسازید.
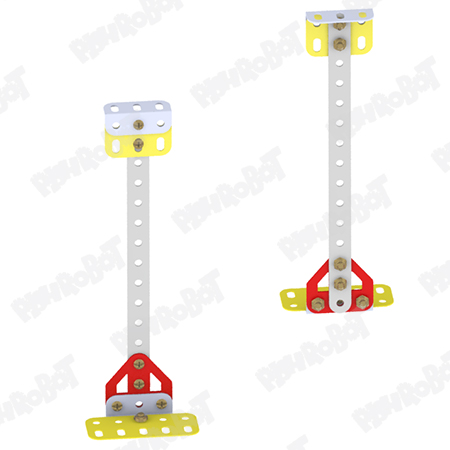
دو عدد پایی که ساختهاید را در وضعیتی که در شکل نشان داده است نسبت به همدیگر قرار دهید و آنها را توسط تسمه ۱۵ تایی به یکدیگر متصل کنید.
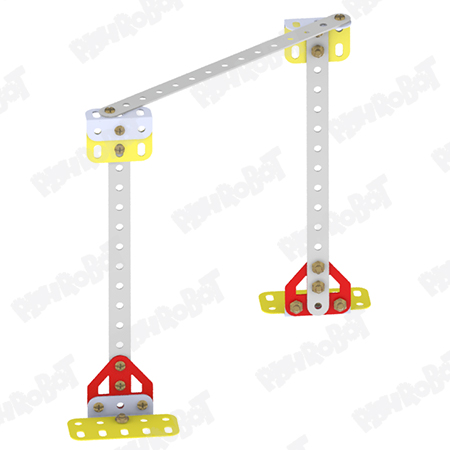
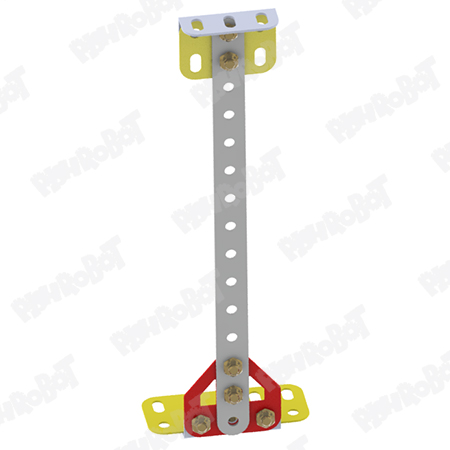
دو پای دیگر را نیز به مشابه مراحل قبل بسازید. با این تفاوت که این بار از تسمه های ۱۱ تایی استفاده نمایید.



۸- مکانیزم چرخ لنگ
در این مرحله از ساخت ربات چهارپا مطابق تصویر پاها را به صورت مفصل و با استفاده از اتصال دو مهره یا مهره قفلی به کرنکها متصل نمایید.
۹- نصب جاباتری و ریموت کنترل
پیشنهاد میکنیم که جاباتری و ریموت کنترل RC-3 را در قسمت پایین ربات چهارپا و بر روی صفحه زرد متصل نمایید. چرا که ضمن تقویت تعادل ربات (به دلیل پایین آمدن مرکز ثقل)، مزاحمتی برای حرکت پاها و مکانیزهای حرکتی سازه ایجاد نمیشود.
جهت دریافت مشاوره رایگان یا ثبت نام کلاس، شماره تماس و نام و نام خانوادگی فرزند خود را ارسال فرمایید تا کارشناسان آموزشی پیشروبات با شما تماس بگیرند.