ربات مثلثی نسخه ۱
2020-07-11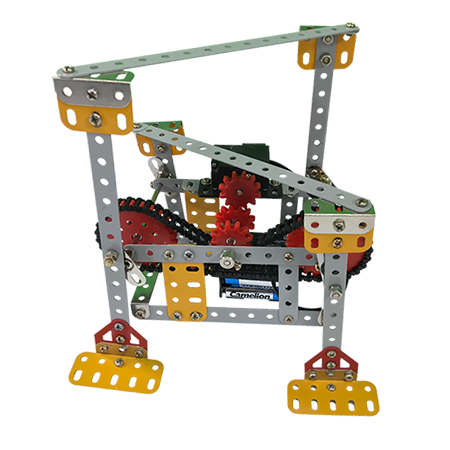
ربات چهارپا
2020-12-02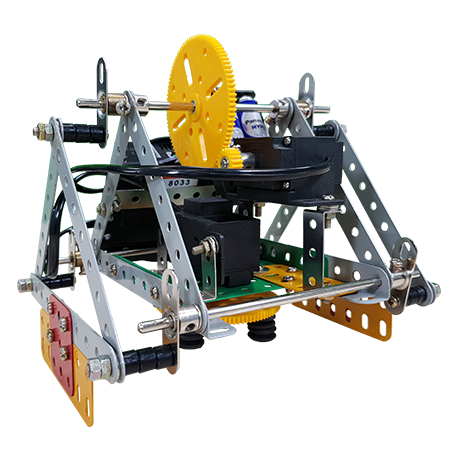
ربات مثلثی نسخه۲
سطح علمی
ترم ۲ و ۳ کای ربات
ارسال توسط
پیشروبات
نوع سازه
غیر هوشمند- کنترلی
پیش از این و در صفحه ربات مثلثی نسخه ۱ در مورد ایده گرفتن از سازهها و رباتهای مختلفی که در فیلم ها و شبکههای اجتماعی ممکن است ببینید، صحبت کردهایم. همچنین گفته شد که بسیاری از آن ایدهها را میتوان با استفاده از پک کای ربات ساخت. به عنوان نمونه یک ربات مثلثی ساختیم که میتواند با استفاده از مکانیزم حرکتی ساده و مانند گوریل ها خود را کمی از زمین بلند کند و یک قدم جلوتر بگذارد.
اما محدودیتی در حرکت این ربات وجود داشت و آن نداشتن قابلیت برای دور زدن و تغییر جهت حرکت بود. در نسخه شماره ۲ این ربات قابلیت چرخش و تغییر جهت را در قالب یک مکانیز ساده اما خلاقانه به آن افزودهایم.
آموزش آنلاین ساخت ربات
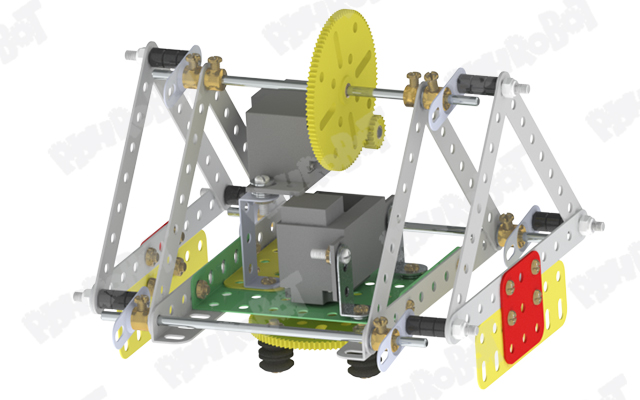
این سازه از لحاظ مکانیزم حرکتی کاملا مشابه نسخه شماره یک خود میباشد و تمام کرنکها بدون اختلاف فاز با یکدیگر حرکت میکنند. اما تنها تفاوت آن بکار بردن مکانیزمی ساده برای افزودن قابلیت تغییر جهت و چرخش به ربات است.
برای ساخت ربات مثلثی نسخه ۲، یک عدد DC موتور دیگر به سطح پایین ربات نصب شده است، به صورتی که شفت موتور به سمت پایین قرار گرفته است. با نصب یک پولی یا چرخدنده بزرگ به این شفت، یک صفحه گردان در زیر ربات به وجود خواهیم آورد. این صفحه چرخان به ما کمک میکند تا زمانی که پاهای ربات از سطح زمین جدا شدهاند و وزن ربات بر روی این صفحه قرار میگیرد، با روشن کردن موتور مربوطه بتوان جهت حرکت ربات را به راحتی تغییر داد.

مراحل ساخت
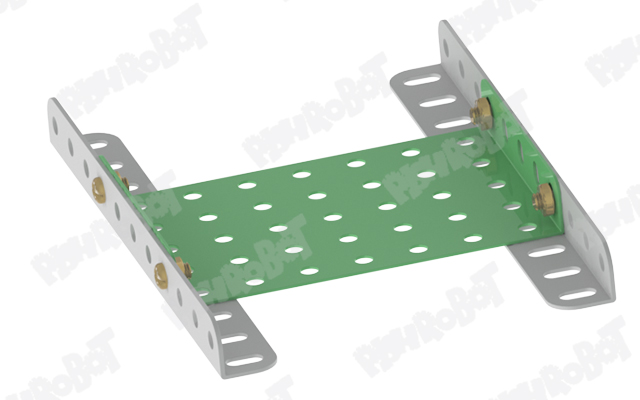
۱- ساخت شاسی
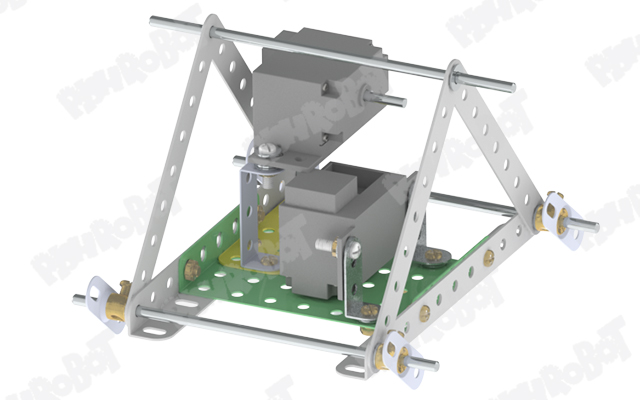
برای ساخت شاسی این ربات دو عدد نبشی ۱۱ تایی را مطابق شکل به یک صفحه سبز لبه دار متصل نمایید.
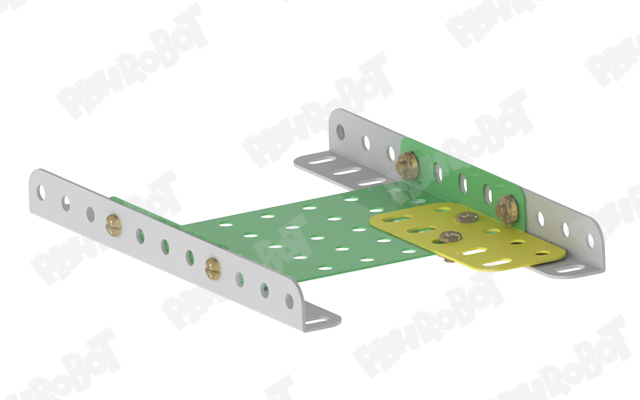
۲- ادامه ساخت شاسی و پایه موتور
یک عدد صفحه زرد پنج تایی را به یک سمت صفحه لبهدار متصل کنید.
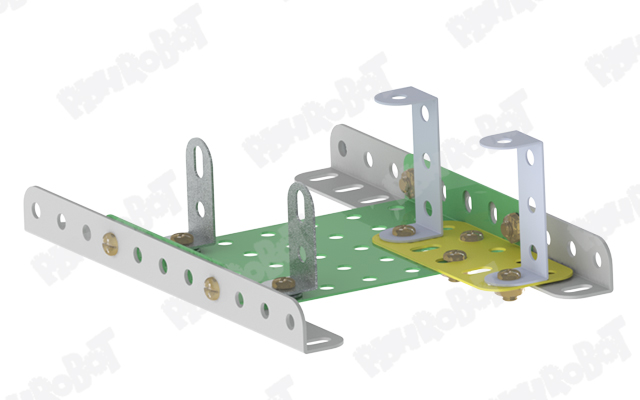
دو عدد L form و دو عدد ناودانی سه تایی را مطابق تصویر به شاسی ربات اضافه نمایید.
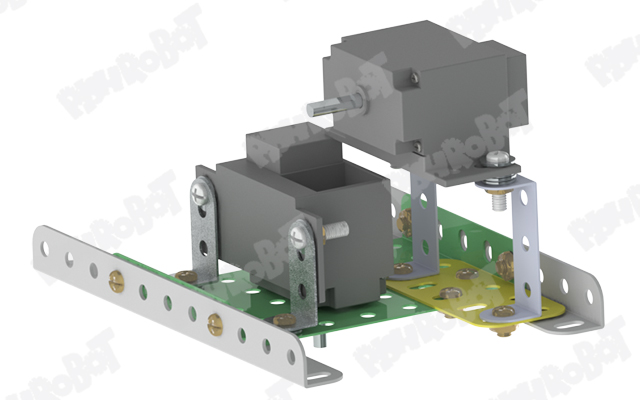
۳- نصب موتور
دو عدد موتور را مطابق شکل بر روی پایهها نصب نمایید.
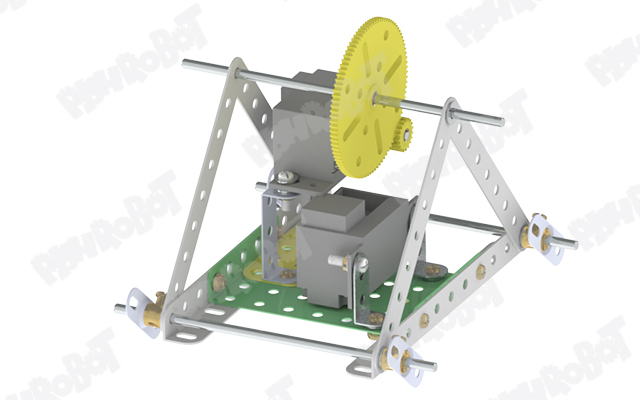
۴- نصب محورها
مطابق شکل، سه عدد محور را به همراه تسمههای ۹ تایی و کرنک بر روی سازه نصب میکنیم. دقت نمایید که کرنکها فقط در انتهای محور های پایین نصب میشوند.
۵- ساخت گیرباکس و انتقال نیرو
جابجایی محور بالایی را با نصب بوش فلزی و کرنک مهار کنید. برای افزایش روان بودن محورها بین بوش فلزی و کرنک، یک واشر فلزی قرار دهید.
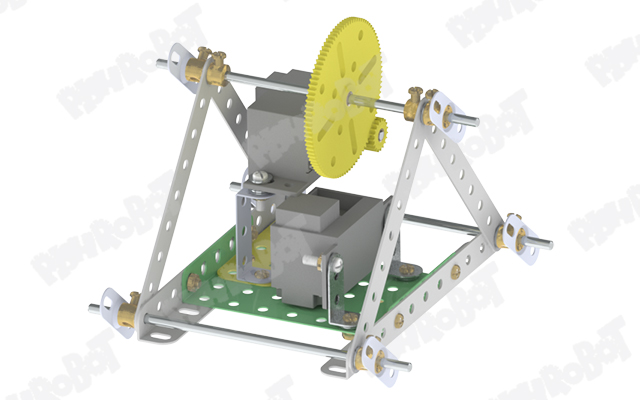
با استفاده از چرخدندههای زرد سایز ۵ و ۱ گیرباکس ساده قدرتی بسازید و حرکت شفت موتور بالایی را به محور مجاورش منتقل نمایید.
۷- ساخت مکانیزم پاها
برای آنکه ربات در هنگام قدم برداشتن بتواند خود را از سطح زمین بلند کند، در هر طرف با استفاده از صفحات فلری ارتفاع پاهای ربات را افزایش دهید. این قسمت میتواند کاملا سلیقهای و خلاقانه باشد. فقط دقت نمایید ارتفاع این قسمت خیلی زیاد نشود.
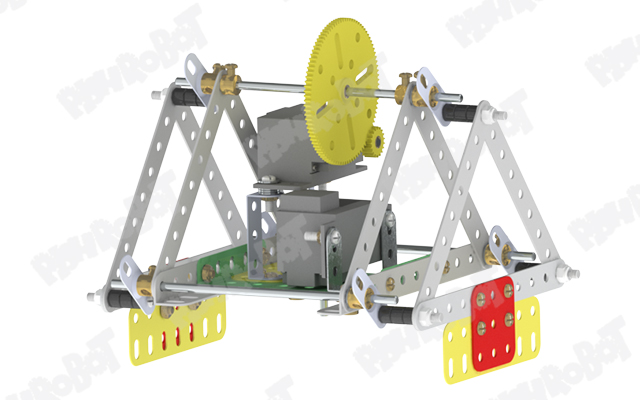
از سوراخ گرد کرنکها پیچ بلند عبور دهید و بعد از استفاده از چند اسپیسر، یک تسمه ۱۱ تایی و دو تسمه ۹ تایی را مانند شکل و با استفاده از مهره قفلی یا روش دومهره به صورت مفصل به پیچها متصل نمایید.

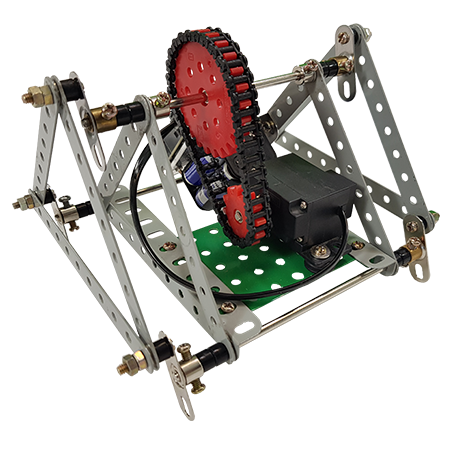
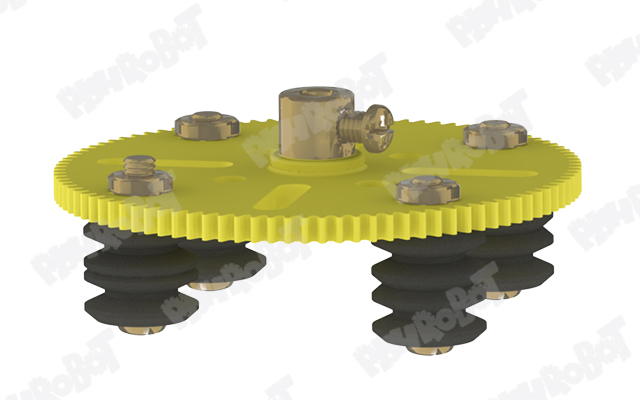
۸- مکانیزم چرخش ربات
برای آنکه ربات بتواند بچرخد لازم است که یک صفحه چرخان در زیرش داشته باشد. برای ساخت این صفحه چرخان به یک چرخدنده سایز ۵ چند بوش لاستیکی یا هر قطعه دیگر متصل میکنیم و سپس مجموعه را به شفت موتور دوم متصل میکنیم.
۹- نصب جاباتری و ریموت کنترل
جهت دریافت مشاوره رایگان یا ثبت نام کلاس، شماره تماس و نام و نام خانوادگی فرزند خود را ارسال فرمایید تا کارشناسان آموزشی پیشروبات با شما تماس بگیرند.