دستگاه ارائه دهنده کارت ویزیت
2020-01-24
رباتهای فوتبالیست متوسطه
2020-02-06ربات مانع نورد
مسیرهای ناهموار
تصور کنید که برای انجام یک ماموریت علمی و اکتشافی فضایی و به دلیل شرایط خاص و خطرناک فضا برای انسان، نیازمند فرستادن یک ربات به سطح سیاره مریخ باشید تا بتواند با تهیه و ارسال تصاویر از نقاط مختلف سطح این سیاره و یا نمونه گیری از خاک مناطق مختلف آن، به گسترش دانش ما کمک کند. بنابراین ربات کاوشگر شما پس از فرود بر روی این سیاره باید بتواند به هر نقطه مورد نظر بر روی سطح آن حرکت کند، مشخص است که به دلیل وجود ناهمواریهای سطح سیاره مریخ، هر ربات چرخداری قادر به انجام این ماموریت نخواهد بود.
همچنین در صورتی که بخواهیم از رباتها برای جاسوسی یا تهیه فیلمهای مستند از زندگی جانوران در محیطهای بکر طبیعی استفاده کنیم، همچنان با مشکل عبور ربات از مسیرهای ناهموار روبرو هستم. بنابراین به دنبال طراحی و ساخت رباتی با چرخ یا مکانیزم حرکتی متفاوتی هستیم تا بتواند بر روی سطوح ناهمواری چون شنزار، سنگلاخ، زمین گلآلود یا زمیننهایی با پوشش گیاهی به راحتی حرکت کند.
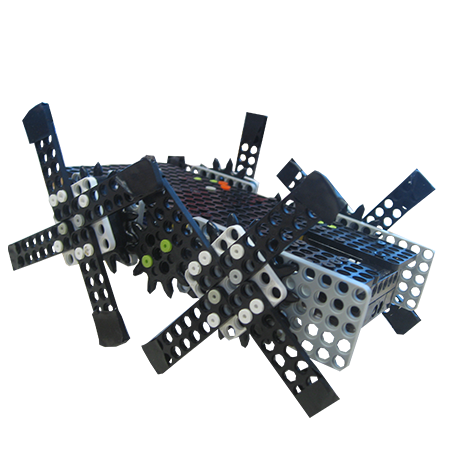
ربات مانع نورد یا ناهموار نورد را میتوان با مکانیزمهای حرکتی متفاوتی ساخت، اما در ادامه مطلب به دو نکته مهم مکانیکی که در ساخت این رباتها باید مد نظر داشته باشید اشاره خواهیم کرد.
4WD
در اکثر اتومبیلهای شهری نیروی موتور به یکی از دو محور جلو یا عقب آن منتقل میشود، اما اگر به خودروهای off road و شاسی بلند توجه کرده باشید در پشت این اتومبیلها نوشتهای با عنوان 4WD خواهید یافت. این نوشته مخفف کلمات 4Wheel Drive و به معنی چهار چرخ محرک میباشد و مفهوم آن این است که در مواقع مورد نیاز مانند حرکت در مسیر های خاکی یا ناهموار راننده میتواند نیروی موتور را به هر دو محور جلو و عقب اتوموبیل منتقل کند، در نتیجه قدرت موتور به هر چهار چرخ منتقل خواهد شد و در صورتی که یک یا دو چرخ در گل و یا شن گیر کند حرکت چرخهای دیگر مانع از توقف اتومبیل و گیر کردن آن خواهد شد. بنابراین در ساخت ربات ناهموار نورد، انتقال نیرو به تمام چرخهای ربات، نقش کلیدی در کارایی آن خواهد داشت.
چرخهای صلیبی
یکی از مکانیزمهای مفید برای ساخت رباتهای ناهموارنورد و رباتهای پله نورد استفاده ازچرخهای صلیبی شکل، به جای استفاده از چرخهای گرد معمولی است. با استفاده از این نوع چرخها کمتر شاهد لغزش و گیر کردن ربات در ناهمواریها خواهید بود. در نمونه ساخته شده برای جلوگیری از لغزش چرخها بر روی پلهها، چسب برق بر روی انتهای آن کشیده شده است تا اصطکاک چرخ با سطوح صیقلی پلهها را افزایش دهد.







سلام من میخواستم این رباتو بسازم همین مه با لوله سفید درست شده ولی اسم قطعه تلکترونیکیشو نمیدونم و ایا برنامه نویسی خاصی داره لطفا راهنمایی فرمایید
سلام. خیلی خوبه که خودت میخواهی یکی از این ربات های جالب رو بسازی. ربات های پله نورد را بدون نیاز به برنامه نویسی هم میتوانی بسازی و حداقل قطعات الکتریکی که برای ساختش نیاز داریی یک DCموتور، جاباتری و یک برد راه اندازهست. برای تهیه این قطعات یا بدست آوردن اطلاعات بیشتر درباره ساخت این ربات حتما با شماره ۰۲۱۸۸۶۵۴۲۹۶ تماس بگیر تا بیشتر بتونیم راهنماییت کنیم.
عالیه و ناهموارنورد یکی از سازه های مورد علاقه منه
سلام. خیلی ممنونیم از توجه شما. شما هم میتونی سازه ناهمواردنورد دلخواهت رو با خلاقیت و سلیقه دلخواهت بسازی و برای ما فیلمشو بفرستی.